磁性角度编码器芯片入门精讲一
2020/02/04
磁性角度编码器芯片经过10多年时间的发展和推广,已被广泛应用于消费、工业和汽车等行业中,目前国内磁编码器芯片的需求量已经超过了每年5000万颗,并且依然在以每年20%~30%的幅度增长。
早期国内的磁编码器芯片市场被欧美以及日本厂商所垄断,2016年,上海麦歌恩微电子推出了第一代自主研发的基于AMR磁阻技术的磁编码器芯片MT6801,经过多年的持续研发和积累,麦歌恩微电子已先后推出了三代磁编码器芯片产品,最新一代的MT6825芯片性能已经达到了业界的顶尖水平。
作为一颗传感器类芯片,磁编码器芯片在使用过程中需要有配套的外部磁路,比如磁铁、磁环等,而且在绝大部分应用中,磁编码器芯片参与整个系统的闭环控制,它的性能会显著影响整个闭环系统的表现。在过去几年中,我们得到很多客户的反馈,他们在初次使用磁编码器芯片的时候,对于磁编码器芯片的性能参数以及如何定义其在系统中的参数要求觉得无从入手。接下来我们会在此逐一的和大家分享如何理解磁编码器芯片核心性能以及应用中的一些常见问题。
1、噪声、分辨率和积分非线性INL
首先我们来了解和认识一下磁编码器芯片的噪声、分辨率和积分非线性INL(或者绝对角度精度)这几个关键性能指标。
噪声是所有电子系统在设计时无法绕开的基础问题,芯片的噪声主要来自内部各类有源和无源器件的噪声,比如电阻和MOS晶体管的热噪声、电阻和MOS晶体管的1/f噪声等,另外信号在传输过程中如果受到了某些干扰,其中有些也会以毫无规律的噪声形式表现在最终的输出上。幸运的是虽然噪声源有很多,但是得益于持续发展的电路和信号处理技术,对于用户来说,磁编码器芯片的噪声主要以电阻和MOS的热噪声为主,而别的形式的噪声基本都被专门的电路“处理”掉了。因此当有部分高端用户利用单独磁敏感元件以及分立的运放、AD转换器和MCU等器件搭建一套磁编码器系统(一般为17位的磁编码器系统)的时候,如何确认各个环节的噪声并抑制他们,将是首先要面对的问题。
噪声的大小将直接影响我们能够分辨的最小角度即分辨率。我们考虑一个简单的例子,一把普通的直尺,最小刻度是1mm,假设每一个1mm的刻度都能被清晰的分辨出来,我们就认为这把尺的分辨率为1mm(但是请注意,这里在谈论分辨率的时候,我们并不关注刻度所代表的长度是否精准,比如13mm的刻度是否真的是13mm);如果由于加工的精度不够,导致有些相邻的1mm刻度重叠了,那么显然这把尺的有效分辨率就达不到1mm了,这就是说一把标称分辨率是1mm的尺,由于加工得不好,导致它的有效分辨率可能只有2mm,有效分辨率比标称的分辨率差了一倍。
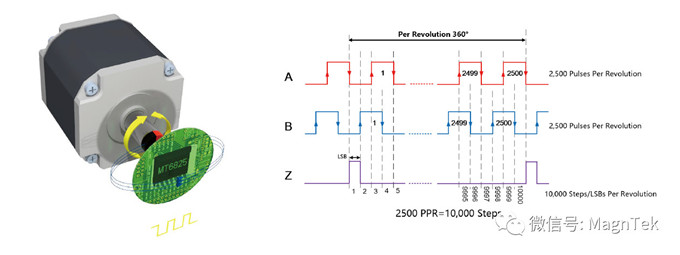
回到我们的磁编码器芯片,系统噪声是影响磁编码器芯片能实现的有效分辨率的最大障碍,过大的噪声将使得相邻的步进变得无法分辨,从而降低了实际的有效分辨率。目前市面上的磁编码器芯片,增量式ABZ输出的有效分辨率一般不超过14位,绝对值角度的有效分辨率一般不超过15位。麦歌恩微电子公司推出的新一代角度编码器芯片MT6825,基于AMR技术的高灵敏度,可提供有效分辨率14位(4096线)的ABZ增量式输出,如图1所示;以及有效分辨率17位的(数据分辨率为18位)绝对值输出,如表1 所示。
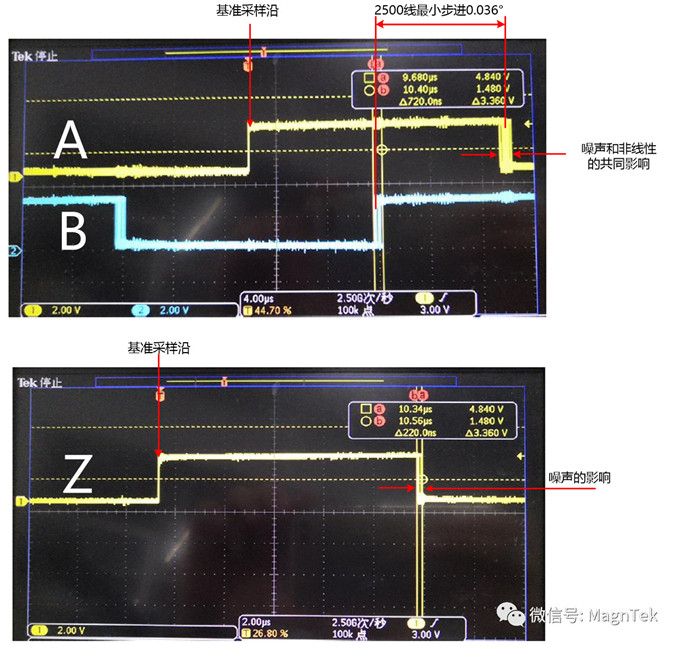
图1. MT6825在AB=2500线分辨率,转速=600转/分钟下实测的ABZ输出噪声
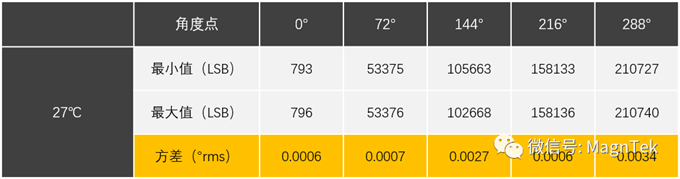
表1. MT6825 18bit绝对值输出在固定角度点连续读取10000次测试得到的噪声
在初步理解了噪声和分辨率的关系之后,我们再回到前面关于刻度尺的例子。对于最小刻度1mm的尺子,正常情况下每个1mm刻度都应该是清晰可区分的,那么接下来的问题就是每个1mm的刻度准确不准确呢?假如尺子量出来是5mm的长度,那么这个5mm到底多精确呢?这就涉及到了INL积分非线性(或者叫绝对精度)的概念了,它定义整个量程内任意一个点和该点的理想值的偏差。比如一把20cm的尺,我们已知1mm一个刻度,总共有200个mm刻度,经过和标准尺的对比测量,我们发现这200个刻度中,第47个刻度点实际长度是46.2mm,偏差了-0.8mm,第128个刻度点实际长度是129.8mm,偏差了+1.8mm,以上2个点是所有刻度点里偏差最大的,因此这把尺的INL=1.8-(-0.8)=2.6mm(峰-峰值)或者INL=±1.3mm(峰值)。
所以对于角度编码器芯片的输出INL积分非线性的理解也和上面的刻度尺一样,如图2所示。目前磁编码器芯片的INL普遍只能做到±0.5°~±1°左右,即使在装配完成后进行一次额外的在线校准,INL目前也只能提高到±0.05°~±0.1°左右(相当于12~13位左右的精度),目前各大厂家都在努力探索各种新的便捷的非线性校准的方法来提升磁编码器芯片的INL性能。
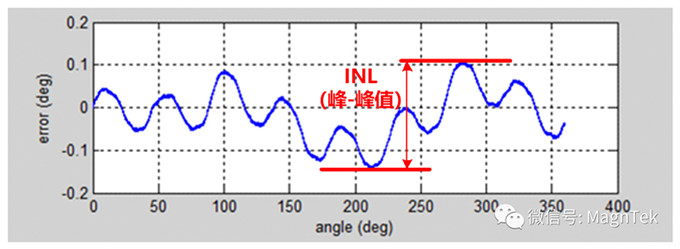
图2. MT6825的一个典型INL特性曲线,此颗样品的INL=±0.125°(峰值)
磁编码器芯片在实际使用中能达到的INL不仅取决于芯片本身,还取决于磁铁的性能、磁铁的安装精度等多种因素。关于磁铁的选型和要求,请参考www.magntek.com.cn关于磁铁的应用笔记。由于绝大部分磁编码器芯片是配合一对极充磁磁铁在轴(同轴)工作的,因此如果磁铁安装位置有偏差(磁铁中心位置没有对准芯片的感应中心),以及磁铁和芯片的间隙(AG:Air Gap)有差别,都会对最终的INL性能造成影响,如图3所示。对于由磁铁和芯片的装配所带来的偏差(在一定范围内),可以在装配完成后,对芯片进行一次重新校准来消除这些影响。一般来说对于12位及以下的应用,确保磁铁选型和装配能够达到芯片产品手册的要求,可以不用进行额外的校准。而对于12位以上的应用,一般建议芯片和磁铁装配完成后,需要进行一次额外的校准,INL才能更好的满足系统要求,比如常见的2500线分辨率的伺服电机控制应用,INL的大小直接决定了伺服电机的速度波动性能。
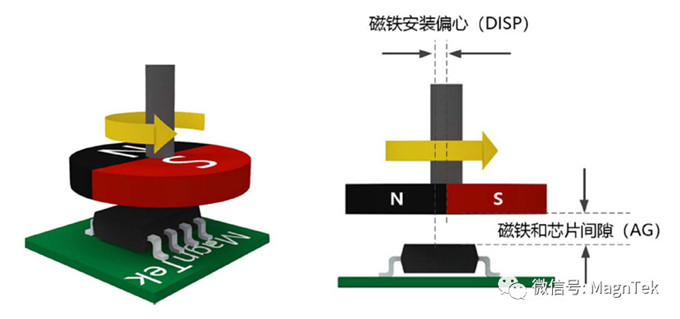
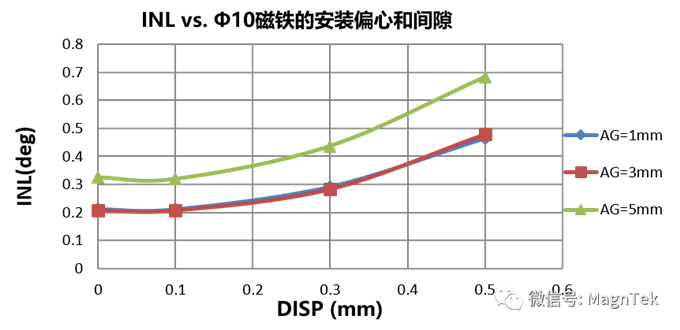
图3. 磁铁安装的偏心和间隙,对最终INL性能的影响
2、手持云台中磁编码器芯片的选型实例

近年来随着移动互联网自媒体的迅猛发展,手持云台火遍大江南北。手持云台中的转动控制就是磁编码器的一个典型应用。每个手持云台需要3颗磁编码器芯片来控制XYZ三个轴的转动。这一应用相比于步进伺服电机应用而言转动速度要低很多;自拍杆的长度一般在1米以内,以拍摄人像、景物等为主,因此角度控制精度INL<±2°对于用户体验就已经足够好了;至于分辨率的选择,出于用户控制转动时候平顺性的体验,10~12位的分辨率足以让用户没有顿挫感。因此,一款分辨率10~12位,INL<±2°的磁编芯片就可以胜任这一应用要求了,如果追求小体积,那么可以选择一款QFN的小封装体芯片即可。